Wprowadzenie
Eksploracja kosmosu, jedno z najbardziej ambitnych przedsięwzięć ludzkości, wymaga nieustannego postępu technologicznego. Bez wątpienia, rozwój robotyki i sztucznej inteligencji stał się kluczowy dla tego procesu. Wraz z rozwojem technologii, możliwe staje się przeprowadzenie coraz bardziej złożonych operacji kosmicznych, które niegdyś byłyby niewykonalne. Rozwój technologii robotycznych i AI otwiera nam drzwi do nowych, nieznanych dotąd możliwości eksploracji kosmosu, jednakże, z każdym nowym wyzwaniem, stajemy także przed szeregiem trudności i niebezpieczeństw. W tym artykule skupimy się na omówieniu najważniejszych systemów robotycznych i AI na potrzeby eksploracji kosmosu oraz wyzwaniach i społecznym odbiorze zastosowania tych technologii w przestrzeni kosmicznej. Badania kosmiczne nie są łatwe i wymagają dużego wkładu finansowego oraz najnowszego stanu wiedzy z dziedzin takich, jak fizyka, matematyka, informatyka, chemia i wiele innych.
W tym kontekście, w niniejszym artykule przedstawimy współczesne przykłady systemów robotycznych korzystających z AI oraz przeanalizujemy wyzwania związane z ich projektowaniem dla celów eksploracji kosmosu oraz omówimy społeczny odbiór ich wykorzystania w przestrzeni kosmicznej.
Projektowanie współczesnych systemów robotycznych korzystających z AI w celu eksploracji kosmosu
Systemy robotyczne to złożone układy mechaniczne, które są zaprogramowane do wykonywania określonych zadań, takich jak zbieranie próbek, wykonywanie napraw i prowadzenie eksperymentów. Współcześnie systemy te są coraz bardziej zaawansowane i wyposażone w szereg funkcjonalności, jak: czujniki, kamery i inne narzędzia do zbierania oraz przesyłania danych, co w efekcie pozwala na ich wykorzystanie w wielu dziedzinach życia, m.in. w eksploracji kosmosu.
Systemy robotyczne wykorzystywane w eksploracji kosmosu zostały opracowane tak, aby wytrzymywały ekstremalne temperatury, promieniowanie, zmiany ciśnienia i inne trudne warunki panujące w przestrzeni kosmicznej. Nowoczesne technologie, takie jak materiały izolacyjne, systemy odpowietrzające, a także systemy samoregulujące i autonomiczne oparte na sztucznej inteligencji, umożliwiają projektowanie systemów robotycznych odpornych na wspomniane trudne warunki kosmiczne. Dzięki tym innowacjom, roboty kosmiczne są w stanie adaptować się do zmieniających się warunków i podejmować decyzje w czasie rzeczywistym, co może przyczynić się do bardziej zaawansowanych badań kosmosu.
AI stała się niezbędnym narzędziem do projektowania nowoczesnych systemów robotycznych do eksploracji kosmosu. Pozwala ona robotom uczyć się i dostosowywać do zmieniającego się otoczenia, wykonywać złożone zadania i podejmować samodzielne decyzje. Dzięki zastosowaniu sztucznej inteligencji do systemów robotycznych, systemy te stają się bardziej wydajne, niezawodne i autonomiczne.
Rovers
Łaziki marsjańskie to zrobotyzowane pojazdy przeznaczone do badania powierzchni Marsa, który jest czwartą planetą od Słońca w naszym układzie słonecznym. Łaziki są wyposażone w wiele instrumentów naukowych, które pozwalają im badać powierzchnię i środowisko Marsa. Instrumenty te mogą analizować skład skał i gleby, wykrywać obecność wody lub lodu, mierzyć warunki atmosferyczne oraz wykonywać zdjęcia i filmy w wysokiej rozdzielczości. Łaziki marsjańskie są zaprojektowane tak, aby poruszać się po nierównym i skalistym terenie, przemieszczać się w górę i w dół zboczy oraz wytrzymywać ekstremalne temperatury i promieniowanie na Marsie. Zazwyczaj są zasilane przez panele słoneczne, które ładują pokładowe baterie, aby działać w nocy, gdy nie ma światła słonecznego. Są one obsługiwane zdalnie przez zespół inżynierów i naukowców na Ziemi, którzy wysyłają polecenia do łazików i otrzymują dane i obrazy z powrotem z misji. Komunikacja z łazikami odbywa się poprzez sieć orbitujących statków kosmicznych, które przekazują polecenia i dane pomiędzy Ziemią a łazikami. Dzięki temu naukowcy mogą zdalnie kontrolować ruchy łazików i zbierać dane naukowe z odległości milionów mil. Niektóre z najbardziej znanych łazików marsjańskich to Sojourner, Spirit, Opportunity, Curiosity i Perseverance.
Perseverance
Konwolucyjne sieci neuronowe (ang. Convolutional neural networks) to rodzaj sieci neuronowych specjalizujących się w przetwarzaniu obrazów. Na pokładzie łazika Perseverance są wykorzystywane do analizy obrazów z kamer, które umożliwiają wykrywanie cech geologicznych i identyfikację interesujących miejsc do dalszych badań.
Rekurencyjne sieci neuronowe (ang. Recurrent Neural Networks, dalej jako RNNs) to inny rodzaj sieci neuronowych, które są wykorzystywane do przetwarzania sekwencji danych, takich jak dźwięki czy ciągi znaków. W Perseverance RNNs są wykorzystywane do analizy dźwięków generowanych przez koła łazika. Dzięki temu naukowcy mogą monitorować ich stan i wykrywać ewentualne uszkodzenia.
Drzewa decyzyjne to algorytm sztucznej inteligencji, który wykorzystywany jest do klasyfikacji danych na podstawie drzewa decyzyjnego. W Perseverance algorytmy te są wykorzystywane do analizy danych zebranych przez instrumenty naukowe, takie jak PIXL. Dzięki temu można klasyfikować skały i minerały na podstawie ich właściwości chemicznych.
PIXL (ang. Planetary Instrument for X-ray Lithochemistry, dalej jako PIXL) to narzędzie naukowe na pokładzie misji Mars 2020 Perseverance, które służy do analizy składu chemicznego skał na powierzchni Marsa. Jest to instrument optyczny, który korzysta z promieniowania rentgenowskiego, aby zbadać skład chemiczny próbek pobranych przez Perseverance. PIXL działa poprzez skanowanie powierzchni skały w mikroskopijnej skali i zbieranie informacji o elementach chemicznych, które się na niej znajdują.
Dzięki PIXL naukowcy mogą zbadać skład chemiczny skał na Marsie i określić ich pochodzenie, co pomoże w zrozumieniu historii geologicznej planety i jej potencjalnej zdolności do życia. PIXL jest jednym z wielu instrumentów naukowych na pokładzie Perseverance, które pomagają w badaniach Marsa i w poszukiwaniu dowodów na to, czy na planecie kiedykolwiek istniały warunki umożliwiające rozwój życia.
Maszyny wektorów wspierających (ang. Support Vector Machines, dalej jako SVMs) to kolejny algorytm sztucznej inteligencji wykorzystywany w łaziku Perseverance do zadań klasyfikacji i regresji w oparciu o zebrane dane. SVMs są używane do analizy danych zebranych przez instrumenty naukowe, takie jak SuperCam. Dzięki temu można rozpoznawać skład chemiczny skał i określać ich genezę.
SuperCam to instrument naukowy na pokładzie marsjańskiego łazika Perseverance, którego głównym zadaniem jest zdalna analiza składu chemicznego skał na powierzchni Marsa. Instrument składa się z kamery, laserowego mikrofonu, spektrometru Ramana i spektrometru widma emisyjnego.
Kamera SuperCam umożliwia wykonanie wysokiej rozdzielczości zdjęć powierzchni Marsa, które są analizowane w poszukiwaniu interesujących miejsc do badań. Laserowy mikrofon pozwala na rejestrowanie dźwięków generowanych przez laser w momencie, gdy ten uderza w skałę. Analiza tych dźwięków umożliwia określenie twardości i innych właściwości skał.
Spektrometr Ramana pozwala na analizę chemiczną próbek, wykorzystując zjawisko rozpraszania Ramana. Dzięki temu instrument może identyfikować minerały i związki organiczne na powierzchni Marsa. Spektrometr widma emisyjnego z kolei umożliwia określenie składu chemicznego skał na podstawie analizy emisji światła z nimi związanej.
Drzewa losowe (ang. Random Forest) to algorytm sztucznej inteligencji, który jest wykorzystywany do klasyfikacji i regresji danych na podstawie lasu drzew decyzyjnych. W Perseverance drzewa losowe wykorzystywane są do analizy danych z instrumentów naukowych, takich jak SHERLOC. Dzięki temu można rozpoznawać i identyfikować skład chemiczny próbek. W przypadku łazika Perseverance, drzewa decyzyjne pomagają naukowcom w identyfikacji składu chemicznego skał i gleby na podstawie danych.
SHERLOC (ang. Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals, dalej jako SHERLOC) jest jednym z siedmiu instrumentów naukowych na pokładzie łazika NASA Mars Perseverance. Jest to spektrometr, który zapewni obrazowanie w drobnej skali i wykorzysta laser ultrafioletowy (UV) do mapowania mineralogii i związków organicznych. SHERLOC został zaprojektowany do badania geologicznego i mineralogicznego składu marsjańskich skał i regolitu, a także do poszukiwania śladów starożytnego życia mikrobiologicznego na Marsie. Zawiera kolorową kamerę o wysokiej rozdzielczości do mikroskopowego obrazowania powierzchni i zapewnia komplementarne pomiary z innymi instrumentami w ładunku. Głównym badaczem SHERLOC jest Luther Beegle z Jet Propulsion Laboratory (JPL) NASA.
Wszystkie wymienione modele sztucznej inteligencji są kalibrowane specjalnie do pracy na Marsie oraz do przetwarzania danych, które są zbierane przez instrumenty naukowe na pokładzie łazika Perseverance. Dzięki nim naukowcy mają możliwość dokładniejszego badania Marsa i zbierania wartościowych informacji na temat składu i właściwości geologicznych planety.
Łazik ten wygląda następująco:

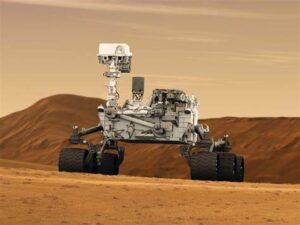
Curiosity
Łazik marsjański Curiosity wykorzystuje wiele algorytmów sztucznej inteligencji do różnych celów, takich jak nawigacja, rozpoznawanie obrazów i analiza danych.
Jednym z kluczowych narzędzi wykorzystywanych przez łazik jest sieć neuronowa zastosowana w ChemCam. Jest to instrument na pokładzie łazika Curiosity, który służy do analizy składu chemicznego skał i gleby na powierzchni Marsa. Algorytm wykorzystujący sieć neuronową w ChemCamie jest nazywany „AEGIS” (Autonomous Exploration for Gathering Increased Science) i umożliwia łazikowi podejmowanie decyzji, które punkty na powierzchni Marsa powinien zbadać bardziej szczegółowo. Łazik Curiosity wykorzystuje również dodatkowo algorytm ROAMS wspomagająca jego system nawigacji.
AEGIS (Autonomous Exploration for Gathering Increased Science) to oprogramowanie opracowane przez NASA, które wykorzystuje sztuczną inteligencję do automatycznego wybierania celów dla łazików marsjańskich. Działanie AEGIS opiera się na trzech głównych etapach: przetwarzaniu obrazów, klasyfikacji obiektów i wyborze najlepszego celu. Na początku łazik Perseverance wykonuje zdjęcia terenu wokół siebie, a następnie oprogramowanie AEGIS przetwarza te zdjęcia i wykrywa na nich obiekty, takie jak skały czy inne formacje geologiczne. Następnie obrazy są klasyfikowane na podstawie wcześniej nauczonych wzorców, które obejmują informacje o kształcie, wielkości i teksturze. Kiedy obiekty zostaną sklasyfikowane, algorytm sztucznej inteligencji dokonuje wyboru najlepszego celu, który ma zostać zbadany przez łazik. AEGIS bierze pod uwagę wiele czynników, takich jak priorytet danego eksperymentu naukowego, dostępność narzędzi naukowych na pokładzie łazika i zdolność do bezpiecznego dotarcia do celu. Po wyborze najlepszego celu, AEGIS przesyła informacje do łazika, który następnie wykonuje manewry, aby zbadać wybrany obiekt. W AEGIS wykorzystywane są różne techniki sztucznej inteligencji, w tym sieci neuronowe i algorytmy uczenia maszynowego. Sieci neuronowe są używane do wykrywania obiektów i klasyfikacji, a algorytmy uczenia maszynowego służą do wyboru najlepszego celu. Oprogramowanie jest stale aktualizowane i ulepszane na podstawie danych zbieranych przez łaziki marsjańskie, aby umożliwić coraz bardziej skuteczne i dokładne badania naukowe.
Algorytm Rover Observational And Autonomous Management System (ROAMS) jest autonomicznym systemem nawigacji i planowania opracowanym przez NASA do użytku na marsjańskich łazikach. Pozwala on łazikom na autonomiczne poruszanie się po marsjańskim terenie, wykorzystując kombinację kamer pokładowych i algorytmów komputerowych do wykrywania i unikania przeszkód, planowania tras i wykonywania manewrów. ROAMS pozwala łazikom działać wydajniej i z większą niezależnością, uwalniając kontrolerów misji na Ziemi od konieczności skupienia się na innych zadaniach. System został użyty w kilku misjach marsjańskich, w tym w łazikach Curiosity i Perseverance.
Łaziki marsjańskie znacznie poszerzyły nasze zrozumienie Marsa i jego potencjału dla przeszłego lub obecnego życia mikrobiologicznego. Utorowały również drogę dla przyszłej eksploracji Marsa przez człowieka, testując nowe technologie i demonstrując wykonalność długotrwałych operacji na powierzchni.
W przyszłości, rovers będą nadal odgrywać ważną rolę w badaniach kosmosu. Planowane są kolejne misje, takie jak Europa Clipper, która ma za zadanie zbadać księżyc Jowisza, Europa, w poszukiwaniu wody i możliwych warunków do życia. Rovers będą też wykorzystywane w badaniach powierzchni Księżyca i Marsa, a także innych planet w Układzie Słonecznym. Dzięki nim, naukowcy będą w stanie pozyskać nowe informacje na temat powierzchni i atmosfer planet, co pomoże w lepszym zrozumieniu kosmosu i jego wpływu na życie na Ziemi.
Łazik ten jest widoczny na poniższym obrazku:
Orbiters
Orbiter to statek kosmiczny, który jest przeznaczony do orbitowania wokół ciała niebieskiego, takiego jak planeta, księżyc lub asteroida. Orbitery są często wykorzystywane do eksploracji naukowej i badań, ponieważ mogą zbierać dane i obrazy ciała, które są na orbicie.
Dokładniej, orbitery mogą być klasyfikowane na podstawie ich celu i rodzaju orbity, na której się znajdują. Na przykład, niektóre orbitery są przeznaczone do badania atmosfery lub powierzchni planety lub księżyca, podczas gdy inne są wykorzystywane do celów komunikacyjnych, takich jak przekazywanie sygnałów z lądownika lub łazika z powrotem na Ziemię. Wykorzystują one też sztuczną inteligencję, która może być użyta do różnych celów, w tym do zarządzania misją, analizowania danych, planowania tras i wykrywania awarii.
Na przykład, w misji orbitera Mars Reconnaissance Orbiter, sztuczna inteligencja jest wykorzystywana do przetwarzania dużych ilości danych obrazowych, zbieranych przez kamerę HiRISE (High Resolution Imaging Science Experiment). AI jest używana do automatycznego wykrywania ciekawych cech powierzchni Marsa, takich jak kraterów, formacji skalnych i innych elementów geologicznych. Po wykryciu takiej cechy, informacje przesyłane są z powrotem na Ziemię, gdzie naukowcy mogą dokładniej zbadać dany obszar.
W przypadku misji orbitera Lunar Reconnaissance Orbiter, sztuczna inteligencja jest wykorzystywana do planowania tras lotu orbitera. AI analizuje dane o topografii i składzie chemicznym powierzchni Księżyca oraz lokalizacji zasobów, takich jak woda, aby zaproponować optymalną trasę dla orbitera.
Sztuczna inteligencja jest również wykorzystywana do zarządzania misją orbitera, takiej jak kontrola energii, optymalizacja wykorzystania zasobów i planowanie awaryjne. Na przykład, sztuczna inteligencja może automatycznie wykrywać i reagować na awarie w orbiterze, takie jak uszkodzenie jednego z instrumentów naukowych lub awarię systemu zasilania.
Mars Reconnaissance Orbiter
Mars Reconnaissance Orbiter (MRO) jest jednym z najważniejszych obecnie działających satelitów Marsa. Został wystrzelony w 2005 roku przez NASA i jest wyposażony w wiele instrumentów naukowych, które umożliwiają dokładne badanie powierzchni i atmosfery planety.
Kamera HiRISE wykorzystuje system AEGIS do autonomicznego wyboru celów do obserwacji. System ten wykorzystuje algorytmy uczenia maszynowego do analizy obrazów powierzchni Marsa wykonanych przez orbiter, identyfikuje interesujące cechy i nadaje im priorytety do dalszych badań.
Kiedy instrument Mars Reconnaissance Orbiter – Mars Climate Sounder – dokonuje pomiarów, statek kosmiczny używa AI do nawigacji po terenie planety. Algorytm uczenia maszynowego znany jako Terrain Relative Navigation (TRN) wykorzystuje obrazy wykonane przez kamery pokładowe orbitera do określenia położenia i orientacji statku kosmicznego względem powierzchni Marsa. Pozwala to statkowi kosmicznemu dostosować swoją trajektorię i zapewnić, że jego instrumenty są skierowane we właściwym kierunku.
Kamera Kontekstowa MRO wykonuje szerokokątne obrazy powierzchni Marsa, które są następnie łączone razem, aby stworzyć mapę planety o wysokiej rozdzielczości. Aby poprawić dokładność tego procesu, naukowcy opracowali algorytmy uczenia maszynowego, które mogą automatycznie zidentyfikować i poprawiać błędy w obrazach spowodowane ruchem statku kosmicznego i innymi czynnikami.
Omawiany orbiter produkuje ogromną ilość danych, które muszą być przesłane z powrotem na Ziemię w celu analizy. Aby jak najefektywniej wykorzystać ograniczone pasmo dostępne do transmisji danych, statek kosmiczny używa algorytmów AI do kompresji danych przed ich przesłaniem. Dzięki temu więcej danych może zostać przesłanych z powrotem na Ziemię w określonym czasie.
Instrument Mars Reconnaissance Orbiter’s Mars Color Imager (MARCI) wykorzystuje algorytmy AI do przewidywania i śledzenia burz pyłowych na Marsie. Algorytmy te analizują obrazy atmosfery planety, aby zidentyfikować zmiany w poziomie pyłu i przewidzieć, kiedy i gdzie burze pyłowe mogą się pojawić.
Orbiter ten jest widoczny poniżej:

Lunar Reconnaisance Orbiter
Lunar Reconnaissance Orbiter (LRO) to sonda kosmiczna NASA, która została wysłana na Księżyc w czerwcu 2009 roku. Jednym z celów misji było stworzenie najbardziej dokładnej mapy powierzchni Księżyca w historii, ale LRO jest również wyposażony w wiele instrumentów naukowych, które pozwalają na badanie różnych aspektów Księżyca, takich jak skład chemiczny, topografia, wiek i ewolucja powierzchni. LRO jest częścią programu NASA Lunar Precursor Robotic Program (LPRP) i jest pierwszym statkiem kosmicznym, który dostarcza szczegółowych pomiarów powierzchni Księżyca od czasu programu Apollo w latach 70.
Instrument Lunar Orbiter Laser Altimeter (LOLA) wykorzystuje AI do poprawy dokładności map topograficznych powierzchni Księżyca. Algorytmy uczenia maszynowego analizują dane wysokościomierza laserowego LOLA, aby zidentyfikować i skorygować błędy spowodowane przez takie czynniki jak szum instrumentu, efekty atmosferyczne i chropowatość powierzchni.
Kamera Lunar Reconnaissance Orbiter Camera (LROC) wykonuje wysokiej rozdzielczości zdjęcia powierzchni Księżyca, które są następnie analizowane przez algorytmy uczenia maszynowego w celu identyfikacji interesujących cech i potencjalnych miejsc lądowania dla przyszłych misji. Na przykład, algorytmy mogą zidentyfikować obszary o wysokim stężeniu wodoru, co może wskazywać na obecność lodu wodnego.
Instrument Diviner mierzy temperaturę powierzchni Księżyca, co może dostarczyć informacji o składzie i strukturze księżycowego regolitu. Aby poprawić dokładność tych pomiarów, algorytmy uczenia maszynowego są wykorzystywane do analizy danych oraz identyfikacji i korekty błędów spowodowanych przez czynniki takie jak dryf instrumentu i efekty atmosferyczne.
Podobnie jak MRO, LRO produkuje dużą ilość danych, które muszą być przesyłane z powrotem na Ziemię. Aby jak najefektywniej wykorzystać dostępne pasmo, statek kosmiczny używa algorytmów sztucznej inteligencji do kompresji danych przed ich przesłaniem.
Jednym z wyzwań związanych z eksploracją Księżyca jest obecność drobnych cząstek pyłu na jego powierzchni, które mogą stanowić zagrożenie dla statków kosmicznych i zdrowia ludzi. Instrument Lunar Dust Detector (LDD) wykorzystuje AI do analizy danych, które zbiera na temat dystrybucji i składu pyłu księżycowego. Algorytmy uczenia maszynowego mogą zidentyfikować wzory w danych i pomóc naukowcom zrozumieć dynamikę środowiska pyłu księżycowego.
Lunar Reconnaissance Orbiter wykorzystuje algorytmy AI do autonomicznej nawigacji wokół Księżyca. Algorytmy te analizują obrazy powierzchni Księżyca wykonane przez kamery statku kosmicznego w celu zidentyfikowania punktów orientacyjnych oraz określenia pozycji i orientacji statku kosmicznego względem Księżyca.
LRO jest również wyposażony w Lunar Impact Monitoring System (LIMS), który wykorzystuje algorytmy uczenia maszynowego do wykrywania i analizowania błysków światła, które pojawiają się, gdy meteoroidy lub inne obiekty uderzają w powierzchnię Księżyca. Badając te zdarzenia uderzeniowe, naukowcy mogą dowiedzieć się więcej o częstotliwości i naturze uderzeń na Księżycu.
W obecnych czasach, zastosowanie sztucznej inteligencji w projektowaniu i sterowaniu systemami robotycznymi jest niezwykle ważne dla prowadzenia badań kosmosu. Systemy te muszą działać w trudnych i zmiennych warunkach, a ich celem jest zdobycie jak największej ilości informacji na temat naszego wszechświata.
Orbitery, takie jak Mars Reconnaissance Orbiter i Lunar Reconnaissance Orbiter, używają sztucznej inteligencji do zbierania i przetwarzania danych, aby pomóc naukowcom w badaniach planet naszego Układu Słonecznego. Dzięki zastosowaniu inteligentnych algorytmów i technik uczenia maszynowego, orbiterzy są w stanie przetwarzać ogromne ilości danych, co zwiększa skuteczność i efektywność badań. Sztuczna inteligencja jest kluczowym narzędziem dla misji kosmicznych i przyczynia się do zdobywania nowych odkryć i poszerzania naszej wiedzy o kosmosie.
Sonda ta prezentuje się następująco:

Wyzwania
Roboty kosmiczne, w tym łaziki, orbitery i lądowniki itd., muszą stawić czoła wielu wyzwaniom wynikającym z trudnego i złożonego środowiska, w którym działają. Wyzwania te mogą wpływać na funkcjonalność robotów, ich żywotność oraz powodzenie misji kosmicznych, do których zostały zaprojektowane.
Sprzętowe
Jednym z podstawowych wyzwań dla robotów kosmicznych są ekstremalne temperatury, które muszą znosić. Temperatury w przestrzeni kosmicznej mogą wahać się od -250°C do 250°C, co może spowodować znaczne uszkodzenia elementów elektronicznych robotów. Aby temu zapobiec, roboty kosmiczne muszą być zaprojektowane tak, aby wytrzymać te ekstremalne temperatury dzięki zastosowaniu specjalistycznych materiałów i systemów chłodzenia.
Innym istotnym wyzwaniem, przed którym stoją roboty kosmiczne, jest narażenie na promieniowanie. Przestrzeń kosmiczna jest wypełniona wysokoenergetycznym promieniowaniem, które może uszkodzić komponenty elektroniczne, co sprawia, że konieczne jest odpowiednie osłonięcie robotów. Roboty muszą być zbudowane z materiałów i elektroniki odpornych na promieniowanie, aby zapobiec uszkodzeniom i zapewnić im długą żywotność w przestrzeni kosmicznej.
Kolejnym wyzwaniem jest zapewnienie, że systemy robotyczne są odporne na zmiany ciśnienia w kosmosie. Gdy robot wychodzi z pojazdu kosmicznego, musi zmierzyć się z ekstremalnymi różnicami ciśnienia, które mogą spowodować awarię systemu. Projektanci korzystają z innowacyjnych rozwiązań, takich jak systemy odpowietrzające i zabezpieczenia przeciwciskowe, które pomagają utrzymać stałe ciśnienie wewnątrz robota.
Opóźnienia w komunikacji są również istotnym wyzwaniem dla robotów kosmicznych. Ze względu na ogromne odległości związane z eksploracją kosmosu, komunikacja z robotami kosmicznymi może mieć znaczne opóźnienia, co sprawia, że sterowanie nimi w czasie rzeczywistym staje się wyzwaniem. To wyzwanie jest szczególnie widoczne w przypadku łazików marsjańskich, gdzie komunikacja z Ziemią może trwać kilka minut lub nawet godzin, co utrudnia szybkie podejmowanie decyzji.
Ograniczenie mocy to kolejne wyzwanie, przed którym stają roboty kosmiczne. Roboty polegają na ograniczonych źródłach zasilania, takich jak panele słoneczne lub baterie, co może ograniczyć ich żywotność operacyjną i funkcjonalność. Aby oszczędzać energię, roboty kosmiczne są projektowane tak, aby były jak najbardziej energooszczędne.
Teren i nawigacja stanowią kolejne istotne wyzwanie dla robotów kosmicznych. Łaziki i inne pojazdy powierzchniowe muszą zmierzyć się z nawigacją po skomplikowanym terenie na innych planetach, który może obejmować strome zbocza, skały i kratery. Te wyzwania wymagają zaawansowanych systemów nawigacyjnych i czujników, które umożliwiają robotom bezpieczną i skuteczną nawigację.
Związane ze sztuczną inteligencją
Podczas gdy załogi kosmiczne są w stanie wykonywać wiele zadań, istnieją sytuacje, w których zdalne sterowanie jest bardziej skuteczne lub nawet jedyną opcją. W takich przypadkach ważne jest, aby systemy AI, które są używane w obsłudze systemów kosmicznych, były autonomiczne i mogły działać w sposób niezależny od człowieka.
Systemy kosmiczne są projektowane i budowane z myślą o określonych celach misji, ale czasami mogą pojawić się niespodziewane okoliczności, które wymagają zmiany planów. W takich przypadkach ważne jest, aby systemy AI, które są używane w obsłudze tych systemów, były elastyczne i w stanie dostosować się do zmieniających się warunków.
Technologia kosmiczna jest dynamiczna i stale się rozwija. Wraz z pojawianiem się nowych technologii i narzędzi, systemy kosmiczne muszą być w stanie się dostosować i wykorzystać nowe możliwości. Dlatego ważne jest, aby systemy AI, które są używane w obsłudze tych systemów, były adaptacyjne i mogły dostosowywać się do nowych warunków i technologii.
Koszty związane z kosmicznymi misjami są ogromne, a każda nieudana misja oznacza straty finansowe i straty czasu. Dlatego ważne jest, aby systemy AI, które są używane w obsłudze tych systemów, były zoptymalizowane i mogły działać w sposób jak najbardziej efektywny.
Algorytmy AI wymagają dużych zbiorów danych do szkolenia i uczenia się na ich podstawie, a roboty kosmiczne mogą nie zawsze mieć dostęp do danych niezbędnych do wykonania określonych zadań. Roboty kosmiczne muszą być zaprojektowane tak, aby efektywnie gromadzić i przetwarzać odpowiednie dane w celu szkolenia algorytmów AI i umożliwienia im wykonywania różnych zadań.
Podsumowując, roboty kosmiczne stoją przed wieloma wyzwaniami ze względu na trudne i złożone środowisko, w którym działają. Pokonanie tych wyzwań wymaga szeroko zakrojonych badań, rozwoju i testów, aby zapewnić skuteczne funkcjonowanie robotów i osiągnięcie celów misji kosmicznych, do których zostały zaprojektowane. Systemy kosmiczne są bardzo skomplikowane i złożone. Do ich obsługi potrzebne są wysokowydajne algorytmy i systemy, które są w stanie szybko przetwarzać duże ilości danych. Dlatego ważne jest, aby systemy sztucznej inteligencji, które są używane w obsłudze tych systemów, były w stanie przetwarzać informacje w czasie rzeczywistym i radzić sobie z dużą złożonością obliczeniową.
Społeczny odbiór
Odbiór rozwoju sztucznej inteligencji w systemach robotycznych w kosmosie jest złożony i może mieć różne aspekty w zależności od kontekstu. Z jednej strony, sztuczna inteligencja może być kluczowym narzędziem w zapewnieniu bezpieczeństwa i wydajności w kosmicznych operacjach, takich jak badania naukowe czy misje załogowe. Z drugiej strony, rozwój sztucznej inteligencji i robotyki w kosmosie budzi obawy dotyczące etyki, prywatności i bezpieczeństwa ludzi.
W przypadku nowych technologii, w tym także sztucznej inteligencji, często pojawiają się obawy związane z ich bezpieczeństwem i nieprzewidywalnością. W związku z tym, poziom zaufania do tej technologii będzie miał duże znaczenie w ocenie jej przydatności i akceptacji.
Część społeczeństwa może twierdzić, że pieniądze wydane na eksplorację kosmosu i roboty mogłyby być lepiej spożytkowane w celu rozwiązywania problemów na Ziemi, ponieważ istnieje wiele pilnych kwestii, takich jak ubóstwo, opieka zdrowotna czy zmiany klimatyczne, które wymagają finansowania i uwagi. Z drugiej strony, zwolennicy eksploracji kosmosu argumentują, że inwestowanie w naukę i technologię może prowadzić do długoterminowych korzyści dla społeczeństwa, takich jak nowe odkrycia, wynalazki i wzrost gospodarczy.
Misje eksploracji kosmosu, w tym te wykorzystujące roboty, mogą być kosztowne, a korzyści mogą nie być natychmiast widoczne lub namacalne. Niektórzy ludzie mogą kwestionować, czy odkrycia naukowe dokonywane przez roboty kosmiczne są warte kosztów misji. Zwolennicy eksploracji kosmosu twierdzą jednak, że odkrycia dokonywane przez roboty mogą mieć znaczącą wartość naukową, technologiczną i kulturową. Na przykład roboty kosmiczne pomogły naukowcom zbadać geologię, atmosferę i historię innych planet, co może poszerzyć naszą wiedzę o otaczającym nas świecie.
Koszt robotów kosmicznych może być porównywany z innymi priorytetami rządowymi, takimi jak obrona narodowa lub edukacja. Politycy mogą być zmuszeni do podejmowania trudnych decyzji dotyczących alokacji zasobów, a opinia publiczna może mieć różne opinie na temat tego, na co powinny być przeznaczone środki finansowe.
Misje kosmiczne są złożone i mogą być nieprzewidywalne, co prowadzi do przekroczenia kosztów. Może to budzić niepokój opinii publicznej, która może się zastanawiać, czy dodatkowe koszty są uzasadnione. Zwolennicy eksploracji kosmosu twierdzą jednak, że misje te wykorzystują najnowocześniejsze technologie i są z natury ryzykowne, dlatego należy spodziewać się nieoczekiwanych wyzwań.
Podsumowując, społeczny odbiór sztucznej inteligencji w obszarze kosmonautyki jest niejednoznaczny. Z jednej strony, AI oferuje nieocenione wsparcie systemów robotycznych, a także umożliwia rozwój bardziej zaawansowanych i bezpieczniejszych systemów kosmicznych. Z drugiej strony, obawy co do bezpieczeństwa i kontroli AI mogą prowadzić do braku zaufania i oporu wobec sztucznej inteligencji w przestrzeni kosmicznej. W związku z tym ważne jest, aby podejść do rozwoju AI w kosmosie z ostrożnością i uwzględniać zarówno korzyści, jak i ryzyka. Wymaga to odpowiedniej regulacji i polityki, która zapewni bezpieczeństwo zarówno dla ludzi, jak i systemów kosmicznych. Jednocześnie, ważne jest, aby przekazywać informacje na temat AI i jej zastosowań w sposób zrozumiały dla społeczeństwa, aby zwiększyć zaufanie i akceptację dla tej technologii. W ten sposób możemy osiągnąć równowagę między postępem technologicznym a potrzebami społecznymi, zapewniając, że AI w kosmosie będzie rozwijać się w sposób bezpieczny i zrównoważony, aby przynieść korzyści dla całej ludzkości.
Podsumowanie
Projektowanie systemów robotycznych oraz sztucznej inteligencji na potrzeby eksploracji kosmosu to gałąź nauki, która zyskuje na coraz większej popularności i znaczeniu. Roboty, wyposażone w inteligentne systemy, mają zdolność do wykonywania zadań, takich jak badanie planet, zbieranie próbek, naprawy satelitów czy budowę infrastruktury kosmicznej. Bez wsparcia robotów czynności te byłyby nieosiągalne dla człowieka.
Niemniej jednak, projektowanie takich systemów jest ogromnym wyzwaniem, związanym z zagadnieniami takimi, jak trwałość w warunkach kosmicznych, odporność na promieniowanie kosmiczne czy bezpieczeństwo. Kolejnym wyzwaniem jest implementacja sztucznej inteligencji, która ma decydować o działaniach robota w warunkach, które mogą się drastycznie różnić od tych na Ziemi.
Społeczny odbiór takich projektów jest także bardzo ważny, ponieważ to ludzie decydują o ich finansowaniu i dalszym rozwoju. Istnieją obawy dotyczące bezpieczeństwa i wpływu takich systemów na pracę ludzi oraz zwiększające się bezrobocie. Z drugiej strony, jednak, eksploracja kosmosu jest niezwykle ważna dla ludzkości, a roboty i sztuczna inteligencja mogą w tym procesie odegrać kluczową rolę.
Dlatego też, aby zapewnić pozytywny społeczny odbiór projektów związanych z robotyką i sztuczną inteligencją w kosmosie, należy zwrócić uwagę na zagadnienia etyczne i bezpieczeństwa oraz prowadzić edukację i informowanie społeczeństwa o korzyściach, jakie takie projekty przynoszą dla ludzkości. W ten sposób, projekty związane z robotyką i sztuczną inteligencją w kosmosie będą mogły rozwijać się, a jednocześnie cieszyć się pozytywnym społecznym odbiorem.
Źródła
https://mars.nasa.gov/mars2020/
https://mars.nasa.gov/msl/home/
https://onlinelibrary.wiley.com/doi/full/10.1002/aisy.202200071