Czy MIT Moral Machine został w tyle wobec nowych perspektyw modułów etycznych w pojazdach samojezdnych? Nowe podejścia skupiają się na adaptacyjności algorytmów, współpracy między pojazdami oraz transparentności decyzji, wychodząc poza statyczne scenariusze eksperymentalne. Warto przyjrzeć się, jak te innowacje zmieniają sposób, w jaki samochody autonomiczne podejmują moralne wybory na drodze i czy te wybory pozwolą na zaistnienie autonomicznych pojazdów na drogach.
Czym są pojazdy samojezdne?
Najprościej mówiąc pojazd samojezdny (autonomiczny, bezzałogowy) to taki, który kieruje sam sobą. Do jego poruszania nie jest potrzebny człowiek. Całą maszyną steruje komputer z odpowiednim oprogramowaniem, który jest w stanie tak poprowadzić maszynę, by pokonywała ona wyznaczoną trasę i omijała przeszkody dojeżdżając do celu podróży.

Można wyróżnić 3 podstawowe kategorie samochodów autonomicznych:
- pojazd poruszający się samodzielnie, ale ze stałym nadzorem kierowcy,
- pojazd poruszający się samodzielnie, ale z kierowcą na pokładzie,
- pojazd w pełni zautomatyzowany, który nie wymaga kierowcy
Pojazd samojezdny nie musi odbiegać wyglądem zewnętrznym od standardowych samochodów. Jego jedynym dodatkowym wyposażeniem jest odpowiedni system, który będzie potrafił nim zarządzać. W skład takiego systemu wchodzą również różnego rodzaju czujniki, które odbierają informacje z otoczenia i przetwarzają je na język komputera. Na tej podstawie dokonywane są wybory. To co jest najważniejsze, to przede wszystkim informacje o otaczających obiektach i ich lokalizacji. W celu pozyskania takich informacji stosuje się widzenie komputerowe (Automotive systems and software engineering: State of the art and future trends 2019).
MIT moral machine
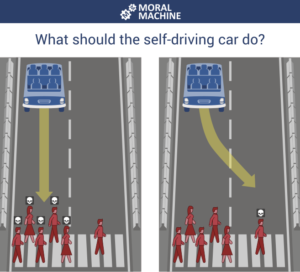
Moral Machine to eksperyment prowadzony przez Massachusetts Institute of Technology (MIT), który ma na celu zbadać preferencje etyczne ludzi w kontekście sytuacji związanych z samochodami autonomicznymi. W ramach tego eksperymentu uczestnicy byli proszeni o dokonywanie moralnych wyborów w sytuacjach, w których autonomiczne pojazdy muszą podjąć decyzję dotyczącą ratowania ludzkiego życia.
Scenariusze te zwykle obejmowały sytuacje, w których samochód musi zdecydować, czy uniknąć wypadku kosztem życia pasażerów czy innych uczestników ruchu drogowego. Eksperyment Moral Machine zbierał dane na temat preferencji ludzi, co może być pomocne w kształtowaniu przyszłych zasad i regulacji dotyczących bezpieczeństwa autonomicznych pojazdów.

Jednakże podjęcie „odpowiedniej” decyzji nie jest proste. Jako ludzie, pomimo, że jesteśmy istotami myślącymi i zdolnymi do empatii, pod wpływem adrenaliny oraz emocji nie jesteśmy w stanie poprawnie ocenić sytuacji. Szczególnie na drodze, gdzie kierujemy się impulsem, chwilą bądź po prostu instynktem.
Zło to zło. Mniejsze, większe, średnie, wszystko jedno, proporcje są umowne a granice zatarte, jeżeli mam wybierać pomiędzy jednym złem a drugim, to wolę nie wybierać wcale.
~Geralt z Rivii
(Ostatnie Życzenie – Andrzej Sapkowski)
Dylematy na drodze
Nie trzeba być kierowcą pojazdu, by mierzyć się z pewnymi dylematami dotyczącymi sytuacji na drodze. Gdy nagłówek artykułu głosi: „Wjechał w grupę pieszych, bo chciał uratować psa”, zastanawiamy się, co my sami zrobiliśmy będąc w analogicznej sytuacji. Często są to pytania, które pojawiają się znikąd, ale trudno na nie odpowiedzieć i być w pełni zgodnym z samym sobą. Odpowiedzi często mogą być dla niektórych kontrowersyjne. Podstawowe pytania, jakie można sobie postawić to:
- Czy wybieramy dobro osób znajdujących się w pojeździe, czy tych będących poza nim?
- Czy stawiamy ludzi nad zwierzęta?
- Czy stawiamy starszych nad młodszych?
- Czy stawiamy kobiety nad mężczyzn?
- Czy status społeczny wpływa na naszą decyzję?
- Czy ważna jest dla nas liczba ocalonych „istnień”?
Pozostałe perspektywy modułów etycznych
Nowe perspektywy modułów etycznych w pojazdach samojezdnych obejmują rozwój bardziej zaawansowanych algorytmów, zwiększenie roli sztucznej inteligencji w podejmowaniu etycznych decyzji oraz integrację z szerokim spektrum społeczności ekspertów i interesariuszy. Poniżej znajduje się opis kluczowych perspektyw modułów, które mogą rozszerzyć badanie MIT’u oraz polepszyć systemy.
Adaptacyjność i uczenie maszynowe
W obecnym czasie, gdzie sztuczna inteligencja jest naprawdę popularna i pomaga ona w codziennym życiu ułatwiając pracę, wyobrażenie sobie systemu inteligentnego pojazdu samojezdnego bez niej jest trudne. Pozwoliłaby ona samochodom dostosowywać swoje zachowanie do zmieniających się warunków drogowych oraz preferencji społecznych.
Współpraca między pojazdami
Autonomiczne pojazdy byłyby w stanie komunikować się ze sobą. Niektóre decyzje byłyby wypadkową decyzji każdego z pojazdów. W sytuacjach, w których konflikt interesów występuje między kilkoma z nich, systemy autonomiczne mogą współpracować w celu znalezienia rozwiązania korzystnego dla wszystkich stron.
Transparencja i odpowiedzialność
Decyzje podejmowane przez moduły etyczne będą bardziej zrozumiałe dla ludzi. Być może zostaną one przetłumaczone na język naturalny. Dzięki temu kierowcy będą w stanie zrozumieć zachowania pojazdów. Ponadto, systemy pozwolą na przegląd historii podejmowanych decyzji oraz ich analizę, co może się przyczynić do zminimalizowania błędów.
Zróżnicowane wartości społeczne
Wszelkie różnice społeczne oraz kulturowe zostaną uwzględnione w modułach etycznych. Będzie przeprowadzone pewnego rodzaju dopasowanie systemu do docelowego odbiorcy oraz miejsca zamieszkania, z którego pochodzi. Oprócz społecznych dostosowań, systemy w samochodach autonomicznych będą mogły zostać dostosowane dla konkretnego kierowcy. W takim przypadku będą one zbierały informacje na temat jego stylu jazdy bądź innych preferencji.
Edukacja i świadomość użytkowników
Niezwykle ważne jest przedstawienie użytkownikom potencjalnych niebezpieczeństw związanych z korzystaniem z autonomicznych pojazdów. „Kierowca” powinien mieć świadomość, na jakiej podstawie będą podejmowane decyzje. Ponadto powinien mieć świadomość, że jego osobiste wybory mogą się drastycznie różnić od tych, które system oznaczył jako optymalne.
Krytyczne scenariusze
Obecne badania powinny się skupiać na rozwiązywaniu problemów z niecodziennymi i skomplikowanymi scenariuszami. Na tym też skupiło się badanie MIT. Celem jest osiągnięcie zrozumienia sytuacji przez system w taki sposób jak człowiek. Najbardziej kontrowersyjne jest zawsze podejmowanie decyzji, która wiąże się z powstaniem etycznego konfliktu. To właśnie tutaj powinien być położony największy nacisk.
Do osiągnięcia sukcesu kluczowym jest połączenie ze sobą wszystkich wymienionych wyżej perspektyw. Warto również wspomnieć, że wraz z rozwojem modułów etycznych, równolegle powinno się opracowywać odpowiednie regulacje oraz standardy, chociażby nawet dla bezpieczeństwa i odpowiedzialności.
Obecny stan badań
Obecny stan badań dla samochodów autonomicznych jest bardzo dynamiczny i obejmuje wiele obszarów, które są aktywnie rozwijane przez naukowców, inżynierów i firmy motoryzacyjne (The future of autonomous vehicles in the US urban landscape: a review: analyzing implications for traffic, urban planning, and the environment). Dziedziny, dla których aktualnie trwają najbardziej zaawansowane badania:
- sztuczna inteligencja – szybki i dynamiczny rozwój pozytywnie wpłynął na rozwój oprogramowania dla autonomicznych samochodów. Dzięki temu tworzone są algorytmy, które są zdolne do analizy danych z sensorów, podejmowania decyzji w czasie rzeczywistym i adaptacji do zmieniających się warunków drogowych,
- sensory – kamery, lidary, radary i ultradźwiękowe czujniki, są kluczowe dla zapewnienia precyzyjnej percepcji otoczenia przez pojazd autonomiczny. Naukowcy starają się integrować różne typy sensorów i opracować techniki przetwarzania danych, które pozwalają na dokładne rozpoznawanie obiektów, pieszych, znaków drogowych i innych pojazdów,
- bezpieczeństwo samochodów autonomicznych koncentruje się na zapobieganiu kolizjom i minimalizacji ryzyka wypadków. Badania obejmują opracowywanie zaawansowanych systemów detekcji i reakcji awaryjnych, testowanie zachowania pojazdów w różnych scenariuszach drogowych oraz pracę nad zgodnością z przepisami i standardami bezpieczeństwa,
- komunikacja między pojazdami (V2V) i komunikacja pojazd-infrastruktura (V2I) – kluczowe dla poprawy bezpieczeństwa i efektywności systemów autonomicznych. Badane są protokoły komunikacyjne, możliwości przesyłania danych o stanie drogi, informacji o sygnalizacji świetlnej i innych czynników, które mogą wpłynąć na zachowanie pojazdu,
- aspekty etyczne i odpowiedzialność – naukowcy starają się opracować algorytmy decyzyjne oparte na etyce, które uwzględniają moralne wybory w trudnych sytuacjach na drodze, a także analizują kwestie odpowiedzialności prawnej i etycznej związanej z wypadkami drogowymi. W kontekście samochodów autonomicznych coraz bardziej rosną w znaczeniu.
Ponadto, trwają również badania dotyczące integracji pojazdów samojezdnych z infrastrukturą drogową oraz społecznością użytkowników dróg.
Roboty dowożące jedzenie? Czemu nie!
Autonomiczne samochody to coś z czym na chwilę obecną nie spotykamy się na co dzień. W odróżnieniu od autonomicznych robotów, które dostarczają nam jedzenie!

Z tym pomysłem możemy się spotkać w większych miastach Polski takich jak Warszawa, Wrocław lub Kraków. Firma, która jest rozpoznawalna z tego typu metod dostaw to Pyszne.pl. Robot wyręcza dostawców, przemierza ulice miast wraz z posiłkiem. Potrafi dostosować się do przepisów ruchu drogowego (zatrzymuje się na czerwonym świetle, rusza na zielonym). Ponadto omija ludzi znajdujących się na jego drodze. Będąc na miejscu, wysyła wiadomość do zamawiającego z powiadomieniem o swoim przybyciu. Po podaniu poprawnego kodu skrytka z jedzeniem zostaje otwarta, a robot udaje się w dalszą drogę.
Przyszłość
Architektura systemu dla pojazdów samojezdnych jest niezwykle skomplikowana. W jej skład wchodzi wiele komponentów, które się ze sobą przenikają, a czasem nawet wykluczają. Auto powinno poruszać się z taką samą precyzją i bezpieczeństwem zarówno po małej miejscowości jak i po dużym mieście. Niewątpliwie jest to najważniejszy moduł „samochodów przyszłości”.
Eksperci od lat zajmują się tym tematem i próbują ustalić, w jaki sposób stworzyć taki system, by był jak najlepszy. Koncept samochodów, które byłyby w stanie same się poruszać nie jest świeżym tematem w branży technologicznej i motoryzacyjnej, a jednak pomimo upływu lat, ciągle nie udało się go rozpowszechnić. Wprowadzenie go w życie wymaga spełnienia kilku warunków:
- podejścia technologicznego obejmującego wiele aspektów,
- stworzenia praw i zasad,
- społecznej akceptacji.

Wszystkie przedstawione w tym artykule modele bądź sposoby podejścia do rozwiązania tego problemu są w większości poprawne i łatwe do zaakceptowania przez społeczeństwo. Natomiast diabeł tkwi w szczegółach i każda z propozycji nie jest idealna w całości. Trudno zatem znaleźć model, który byłby w stanie zadowolić wszystkich, w szczególności, że w kwestii samochodów pojawiają się jeszcze kwestie odpowiedzialności za podejmowane decyzje.
MIT moral machine z pewnością dało dobre podwaliny do tworzenia pozostałych modeli, które mogą korzystać z zebranych danych bądź je uzupełniać i łączyć. Dlatego też nie powinno zostać całkowicie odrzucone w kontekście przyszłych badań i procesów ulepszania systemów sterowania. Analizując jednak obecny stan oraz tempo rozwoju tej gałęzi, wydaje się, że przed społeczeństwem jeszcze długa droga zanim przyjmie w pełni autonomiczne samochody na swoje drogi. Jeszcze dłuższa droga przed oddaniem możliwości decydowania o sobie komputerowi, nawet jeśli byłby to najlepszy sprzęt na świecie.
Literatura
Mallozzi, P., Pelliccione, P., Knauss, A., Berger, C., & Mohammadiha, N. (2019). Autonomous vehicles: state of the art, future trends, and challenges. Automotive systems and software engineering: State of the art and future trends, 347-367.
Orieno, O. H., Ndubuisi, N. L., Ilojianya, V. I., Biu, P. W., & Odonkor, B. (2024). The future of autonomous vehicles in the US urban landscape: a review: analyzing implications for traffic, urban planning, and the environment. Engineering Science & Technology Journal, 5(1), 43-64.
Martínez-Díaz, M., & Soriguera, F. (2018). Autonomous vehicles: theoretical and practical challenges. Transportation research procedia, 33, 275-282.