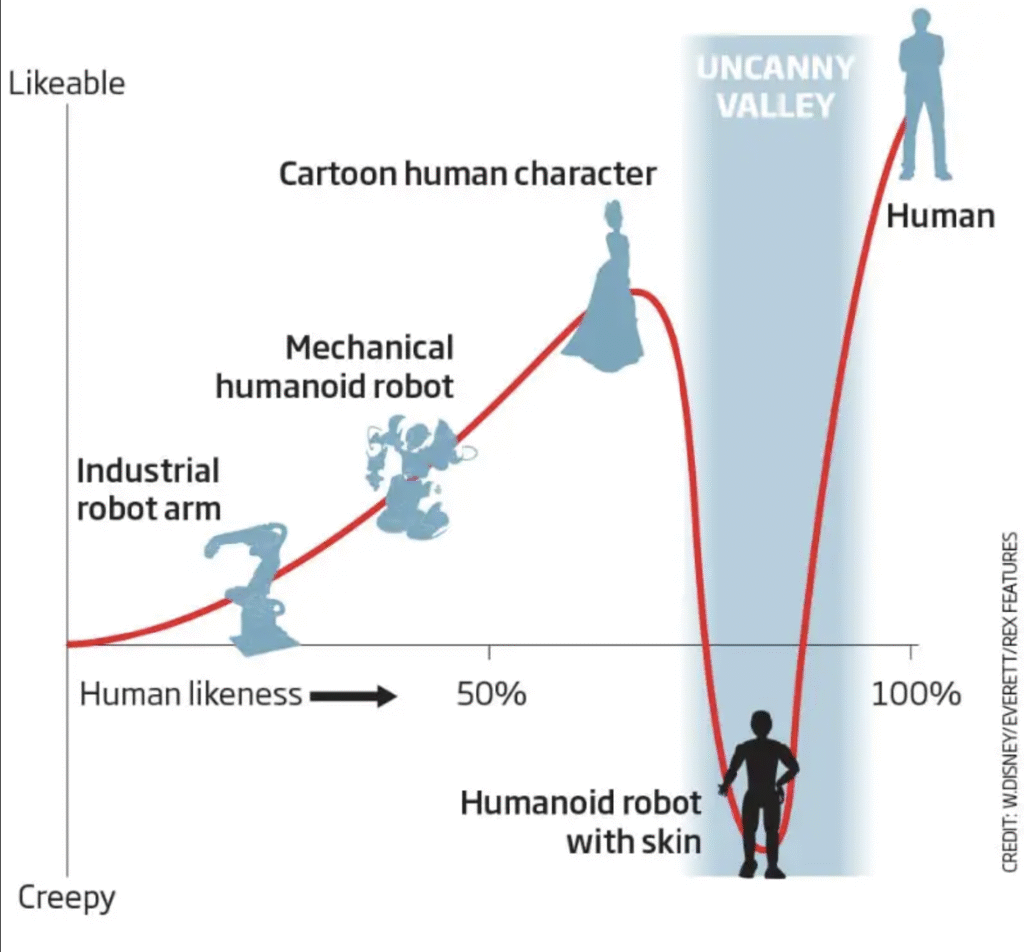
Zjawisko „uncanny valley” odnosi się do dyskomfortu lub niepokoju, jaki odczuwają ludzie w reakcji na obiekty, które są niemal – ale nie do końca – ludzkie w wyglądzie lub zachowaniu. Termin ten został wprowadzony przez japońskiego badacza Masahiro Moriego w latach 70. XX wieku, opisując wykres reakcji emocjonalnej na różne poziomy podobieństwa do człowieka. Im bardziej robot, animacja czy sztuczna inteligencja przypomina człowieka, tym bardziej jest nam przyjazna – aż do momentu, gdy staje się zbyt podobna, ale nadal nienaturalna. Wtedy reakcja staje się odwrotna – pojawia się niepokój, strach lub obrzydzenie. Efekt ten ma istotne znaczenie w robotyce, animacji komputerowej i projektowaniu interfejsów, ponieważ pokazuje, jak delikatna granica oddziela to, co realistyczne i akceptowalne, od tego, co wywołuje instynktowny lęk.
Źródła zjawiska Uncanny Valley
Od kiedy japoński inżynier Masahiro Mori w 1970 roku opisał zjawisko zwane Doliną Niesamowitości, temat ten nieprzerwanie fascynuje badaczy z różnych dziedzin – od psychologii i neuronauki po robotykę i sztuczną inteligencję. Przez lata powstało wiele koncepcji tłumaczących, dlaczego istoty przypominające ludzi, ale odbiegające od nich w subtelny sposób, wywołują w nas uczucie niepokoju, a czasem nawet wstrętu. Choć nasz mózg świetnie rozpoznaje ludzkie twarze i emocje, to nawet drobne różnice mogą przekroczyć granicę, która dzieli człowieczeństwo od „nieludzkości”.
żródło: https://www.newscientist.com/article/dn28432-into-the-uncanny-valley-80-robot-faces-ranked-by-creepiness/
Jedna z często przywoływanych teorii głosi, że to ewolucyjny mechanizm obronny – zdolność do szybkiego zauważenia, że coś z czyimś wyglądem lub zachowaniem jest nie w porządku, mogła w przeszłości zapewniać przetrwanie. Twarz, która jest niemal ludzka, ale wykazuje pewne nienaturalne cechy – jak dziwna mimika czy nienaturalny ruch oczu – może uruchamiać w nas systemy ostrzegawcze.
Inna koncepcja sugeruje, że mamy do czynienia z konfliktem poznawczym – mózg nie potrafi jednoznacznie zaklasyfikować obiektu jako człowieka lub nie-człowieka, przez co dochodzi do wewnętrznej sprzeczności. To napięcie między tym, co znajome, a tym, co obce, może zakłócać nasze poczucie spójności i wywoływać dyskomfort.
Badania z zakresu neuronauki pokazują, że ten specyficzny odbiór „prawie ludzkich” postaci angażuje konkretne obszary mózgu, zwłaszcza korę przedczołową (odpowiedzialną za wyższe procesy poznawcze i analizę społeczną) oraz ciało migdałowate (które reaguje na bodźce emocjonalne, w tym strach). Oba te regiony uaktywniają się silniej, gdy widzimy coś, co wizualnie lub ruchowo nie do końca zgadza się z naszymi oczekiwaniami.
Co ciekawe, nie wszyscy reagują na Dolinę Niesamowitości w ten sam sposób. Różnice indywidualne są wyraźne – niektórzy są bardziej wyczuleni na „nieludzkie” detale. Może to wynikać zarówno z cech biologicznych, jak np. empatii, jak i z doświadczeń kulturowych czy środowiskowych, np. częstego kontaktu z nowoczesną technologią, animacjami czy robotami.

Choć koncepcja Doliny Niesamowitości zdobyła duże uznanie, nie brakuje sceptyków. Wielu naukowców uważa, że nie mamy do czynienia z jednym zjawiskiem, ale raczej z zespołem reakcji psychologicznych i percepcyjnych, które mogą wynikać z różnych przyczyn i przejawiać się w odmiennych sytuacjach – od wyglądu, przez sposób poruszania się, po ton głosu.
Z jednej strony, reakcje na postacie „niemal ludzkie” mogą być zależne od kontekstu kulturowego lub generacyjnego. Osoby wychowane w otoczeniu technologii, robotów czy efektów komputerowych mogą być na nie bardziej odporne.
Z drugiej strony, niektórzy badacze twierdzą, że efekt Doliny Niesamowitości to po prostu wynik ogólnych mechanizmów poznawczych – np. trudności w kategoryzacji lub braku przyzwyczajenia do określonych bodźców. To, co uznajemy za „dziwne”, może być efektem niepewności poznawczej.
Jak poradzić sobie z Uncanny Valley – czyli co zrobić, żeby roboty przestały nas przerażać?
Istnieją dwa podstawowe sposoby wyjścia z “Doliny niesamowitości” – obiekt może stać się mniej podobny, albo bardziej podobny do prawdziwego, zdrowego człowieka.
Dehumanizacja – zmniejszenie podobieństwa do człowieka
Tworząc robota lub animowaną postać, która nie powinna wzbudzać w odbiorcach lęku, często stosowane jest celowe odrzucenie dążenia do maksymalnego podobieństwa do człowieka. Dzięki takiemu podejściu można całkowicie uniknąć wpadnięcia w “Dolinę niesamowitości”. Psychologowie wyróżniają dwa główne rodzaje dehumanizacji – obydwie formy dehumanizacji są związane z tym, jak postrzegamy umysł jakiegoś obiektu, czyli jego zdolność do działania i odczuwania.
Dehumanizacja animalistyczna
W tym przypadku obiekty przestają być postrzegani jako istoty rozumne i cywilizowane, a zaczynają być postrzegane bardziej jako zwierzęta. Nie można więc w ich przypadku mówić o cechach takich jak samokontrola, inteligencja, moralność czy kultura – czyli wszystko to, co uznajemy za różniące ludzi od zwierząt. Taka percepcja pozwala widzieć obiekt jako niższą formę życia – coś, co można kontrolować lub wykorzystywać do własnych celów bez zwracania uwagi na emocje i odczucia obiektu.
Dehumanizacja mechanistyczna
Ten rodzaj dehumanizacji opiera się na tym, że obiekt jest pozbawiony emocji, indywidualności i ciepła – traktowany jest jak bezuczuciowy automat. Przestaje być kimś, kto czuje, kocha, cierpi. Taki sposób myślenia sprawia, że widzimy obiekty nie jako ludzi, jako zimne maszyny, narzędzia, które są wytworem rąk człowieka i stworzone zostały po to, aby pomagać mu w wykonywaniu powtarzalnych czy uciążliwych czynności.
Badania wykazały między innymi, że przeczytanie przed przystąpieniem do interakcji z robotem krótkiej informacji:
“Although advanced robots can look similar to humans, they lack the most essential of human qualities-the ability to feel. Robots cannot experience love, desire, or any other emotions. They completely lack the ability to feel pain or pleasure. Unlike people, robots are not conscious; there is nothing that it is like to be them. Robots are merely a collection of cold silicon circuits.”
„Chociaż zaawansowane roboty mogą wyglądać podobnie do ludzi, brakuje im najistotniejszej cechy ludzkiej – zdolności do odczuwania. Roboty nie potrafią doświadczać miłości, pożądania ani żadnych innych emocji. Całkowicie brak im zdolności do odczuwania bólu czy przyjemności. W przeciwieństwie do ludzi, roboty nie są świadome. Roboty to jedynie zbiór zimnych obwodów krzemowych.”
Znacząco zmniejszyły występowanie zjawiska doliny niesamowitości wśród uczestników badania, niezależnie od tego, czy w kolejnym kroku osoby uczestniczące w badaniu oglądały tylko film z istotą humanoidalną, czy wchodziły w interakcję z humanoidalnymi robotami w obsługiwanym przez nie hotelu (Henn na Hotel w Japonii).
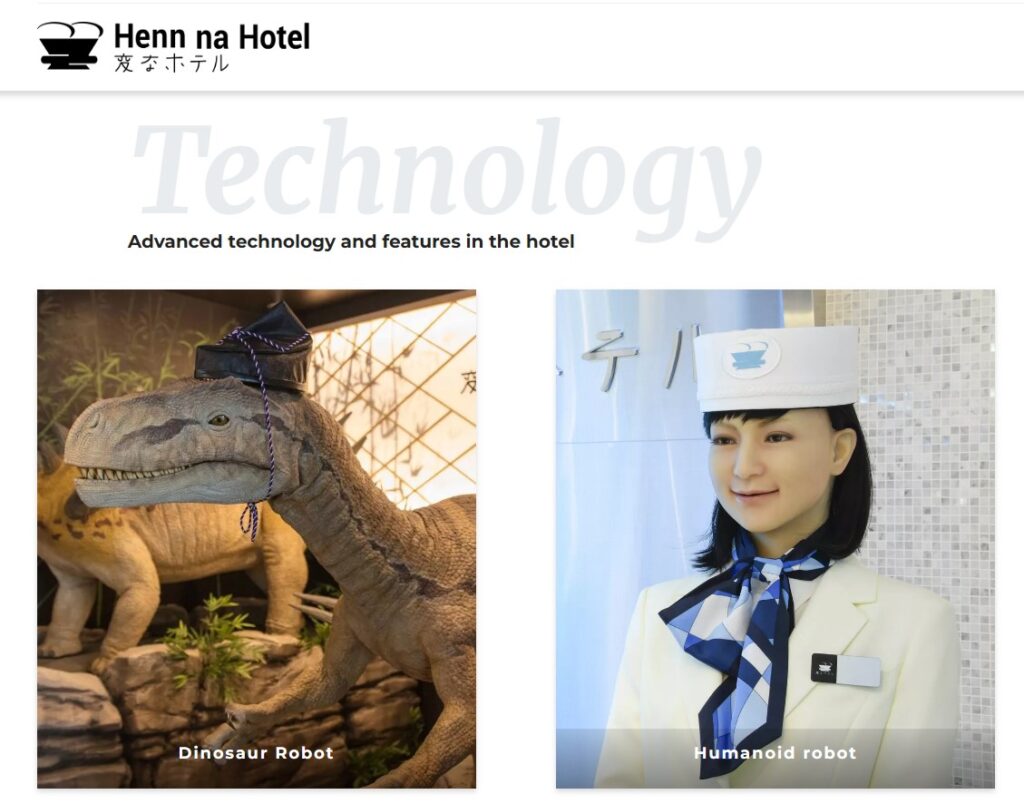
Sama sieć hoteli Henn na Hotel, której obiekt w Sasebo, został w 2015 roku wpisany do Księgi Rekordów Guinessa jako pierwszy hotel obsługiwany przez robotyczny personel, również stosuje w niektórych swoich obiektach dehumanizację animalistyczną – klienci mogą zdecydować się na wybór placówki, w której zamiast robotów humanoidalnych obsługiwać ich będą roboty przypominające dinozaury.
Antropomorfizacja – zwiększenie podobieństwa do człowieka
Antropomorfizacja to zabieg polegający na nadawaniu zwierzętom lub przedmiotom nieożywionym cech ludzkich. Może on odnosić się nie tylko do upodabniania wyglądu fizycznego antropomorfizowanych obiektów do ludzi, ale również do dodawania im pozorów uczuć czy emocji. Zabieg ten jest często wykorzystywana w literaturze, animacji i innych dziedzinach kultury (np. greccy bogowie przedstawiani jako ludzie w mitologii).
LLM jako sposób uczynienia robota bardziej podobnym do człowieka
Badania przeprowadzone przez badaczy z uniwersytetu w Genewie udowodniły, że sama zmiana sposobu, w jaki robot prowadzi konwersację z użytkownikiem może wpłynąć na jego postrzeganie jako mniej dziwnego i wrogiego. W badaniu wykorzystany został robot Nadine, który jest jednym z najbardziej realistycznych humanoidalnych robotów społecznych, zaprojektowanym do interakcji z ludźmi. Zastosowany w nim pierwotnie chatbot A.L.I.C.E., oparty na regułach system zbudowany przy użyciu języka AIML (Artificial Intelligent Markup Language) został na czas badania zastąpiony systemem konwersji zbudowanym za pomocą frameworka LangGraph i wykorzystującym model gpt-4o-mini od OpenAI.

Następnie uczestnicy byli zapraszani do prowadzenia swobodnej, otwartej rozmowy z robotem, w której mogli samodzielnie wybierać tematy i zadawać pytania bez żadnych z góry narzuconych ograniczeń, a następnie zakończyć rozmowę w dowolnym momencie. Po jej zakończeniu byli proszeni o ocenę interakcji z robotem. Na podstawie zebranych odpowiedzi autorzy stwierdzili, że w ogólności odnotowano istotny spadek w postrzeganiu dziwności robota i zwiększenie zadowolenia z korzystania z niego. Uczestnicy badania doceniali zwłaszcza płynność i spójność rozmowy (naturalność) oraz zdolność do utrzymania zaangażowania. Mimo zastosowania zaawansowanego LLM nie udało się w całości wyeliminować zjawiska “Doliny niesamowitości” – część użytkowników badania nadal odczuwała dyskomfort podczas interakcji z robotem Nadine.
Nvidia Audio2Face
Jednym z najcięższych do odwzorowania aspektów ludzkiego ciała jest mimika związana z emocjami. Gry komputerowe i animacje często są krytykowane za nienaturalne grymasy pojawiające się na twarzach cyfrowych postaci, co może mieć związek z występowaniem zjawiska “Uncanny valley”. Problem ten można rozwiązać między innymi stosując technologię motion capture zbierające położenie markerów podczas wykonywania określonych czynności przez ludzkich aktorów, a następnie stosować zebrane w ten sposób dane do postaci w świecie cyfrowym.
Rozwiązaniem, które nie wymaga stosowania profesjonalnych (i drogich) urządzeń motion capture i umożliwia prostsze tworzenie realistycznych animacji twarzy jest zaprezentowany przez Nvidię model Audio2Face, który przewiduje zmiany położenia kluczowych punktów twarzy na podstawie dostarczonych próbek dźwięku. Rozwiązanie to jest możliwe do wykorzystania między innymi z modelami MetaHuman w środowisku Unreal Engine. Istnieją również podobne rozwiązania, które na podstawie próbki dźwiękowej przewidują także animacje rąk cyfrowego awatara.
Wideo prezentujące działanie najnowszej wersji modelu Audio2Face:
Ewolucja – czy musimy przyzwyczaić się do robotów przypominających ludzi?
Istnieje wiele hipotez mówiących o tym, że problem “Uncanny valley” może z czasem zanikać. Im bardziej ludzie będą przyzwyczajeni do robotów humanoidalnych, z którymi będą mieli styczność na co dzień, tym większa istnieje szansa, że podobne do ludzi roboty nie będą już wywoływać w nich strachu i obrzydzenia.
Źródło: https://tezukainenglish.com/wp/?page_id=138
Dowodem, który może potwierdzać zanikanie zjawiska „Doliny niesamowitości” jest Japonia, której mieszkańcy mają bardziej pozytywne nastawienie do robotów humanoidalnych niż mieszkańcy Europy. Japońscy są znacznie bardziej skłonni zaakceptować tego typu roboty w swoim środowisku i wciąż postrzegają je bardziej jako maszyny niż jako istoty przypominające człowieka. Prawdopodobnie wynika to ze znacznie większej obecności robotów w filmach, kreskówkach, komiksach i innych wytworach kultury, z którymi mieszkańcy tego kraju zapoznają się od najmłodszych lat. Ważnym czynnikiem wpływającym na pozytywne postrzeganie robotów humanoidalnych okazuje się również wiek osób, które takie roboty oceniają – w badaniach przeprowadzonych w Japonii i Wielkiej Brytanii stwierdzono nawet, że uczestnicy z Wielkiej Brytanii w wieku 20–29 lat mieli bardziej pozytywne odczucia wobec robotów humanoidalnych niż jakakolwiek inna grupa wiekowa, w tym ich rówieśnicy z Japonii.
Celowe wykorzystanie “Uncanny valley”- czyli co zrobić, jeśli chcemy wywołać w odbiorcy dyskomfort
Chociaż zazwyczaj efekt “Doliny niesamowitości” jest zjawiskiem niepożądanym, coraz częściej celowo wykorzystuje się ten efekt w filmach, grach czy sztuce, aby wzmocnić przekaz, zbudować napięcie lub podkreślić nienaturalność postaci. Przykładem może być wykorzystywanie realistycznych, ale nieco zniekształconych androidów czy awatarów w narracjach science fiction – ich subtelna obcość wywołuje dyskomfort, który idealnie wpisuje się w tematykę obawy przed technologią lub utratą człowieczeństwa. Często również negatywne postaci, antagoniści głównych bohaterów, w różnych dziełach popkultury posiadają zniekształcone ciała, które sprawiają, że widz już od pierwszego spojrzenia jest do nich negatywnie nastawiony.

Przykładem takiej sytuacji może być na przykład przedstawienie golluma w filmie “Władca pierścieni” Petera Jacksona. Wygląda on częściowo jak człowiek, ale ma zdeformowane ciało, nienaturalne ruchy i ogromne, wyraziste oczy. Dzięki zastosowaniu technologii motion capture jego emocje i mimika są natomiast bardzo realistyczne, co jeszcze bardziej pogłębia wrażenie niemal ludzkiego charakteru tej postaci. Celowe wprowadzenie “uncanny valley” pozwala zatem twórcom manipulować emocjami odbiorcy w bardzo precyzyjny sposób.
Literatura:
- Haslam, “Dehumanization: An integrative review”, “Personality and Social Psychology Review”, 10 (3) (2006), pp. 252-264
- Kai Chi Yam, Yochanan Bigman, Kurt Gray, “Reducing the uncanny valley by dehumanizing humanoid robots”, “Computers in Human Behavior”, Volume 125, (2021) (https://www.sciencedirect.com/science/article/pii/S0747563221002685 )
- Japońskie hotele obsługiwane przez roboty
- Hangyeol Kang, Thiago Freitas dos Santos, Maher Ben Moussa, Nadia Magnenat-Thalmann “Mitigating the Uncanny Valley Effect in Hyper-Realistic Robots: A Student-Centered Study on LLM-Driven Conversations” (2025) (https://arxiv.org/abs/2503.16449)
- Tero Karras, Timo Aila, Samuli Laine, Antti Herva, Jaakko Lehtinen, “Audio-Driven Facial Animation by Joint End-to-End Learning of Pose and Emotion”, SIGGRAPH 2017 (https://research.nvidia.com/publication/2017-07_audio-driven-facial-animation-joint-end-end-learning-pose-and-emotion)
- Wpis na blogu Nvidia prezentujący działanie najnowszej wersji algorytmu Audio2Face (2025)
- Junming Chen and Yunfei Liu and Jianan Wang and Ailing Zeng and Yu Li and Qifeng Chen, “DiffSHEG: A Diffusion-Based Approach for Real-Time Speech-driven Holistic 3D Expression and Gesture Generation” (2024) (https://arxiv.org/abs/2401.04747 )
- Kerstin Sophie Haring, Céline Mougenot, Fuminori Ono, Katsumi Watanabe, “Cultural Differences in Perception and Attitude towards Robots”, “International Journal of Affective Engineering”, 13, 3, pp.149-157 (2014) (https://www.jstage.jst.go.jp/article/ijae/13/3/13_149/_pdf)
- Tatsuya Nomura, Dag Sverre Syrdal, Kerstin Dautenhahn, “Differences on social acceptance of humanoid robots between Japan and the UK” AISB Convention 2015. (https://rins.st.ryukoku.ac.jp/~nomura/docs/FSQ_NFHRI2015.pdf )
- Rosenthal-von der Pütten, A. M., Krämer, N. C., Maderwald, S., Brand, M., & Grabenhorst, F. (2019). Neural mechanisms for accepting and rejecting artificial social partners in the uncanny valley. Journal of Neuroscience, 39(33), 6555–6570. https://doi.org/10.1523/JNEUROSCI.2956-18.2019